Updated March 23, 2023
Introduction to Robotics
In the field of Informatics and Engineering, robots are developed, devices that can move and respond to sensory data. Robotics is an intelligence branch. Robots are now widely applied in industries, such as welding and riveting, for highly accurate work. These are also used to clean up toxic waste or disinfect bombs in special situations that could be dangerous for humans. Although great advances in robotics in the last ten years are being made, robots remain not very useful in daily life as they are too repetitive to accomplish ordinary homework.
Building Blocks
Given below are the building blocks of a robotic system:
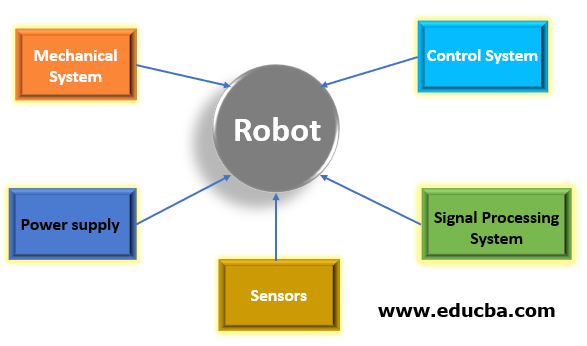
- Mechanical System: This is the most basic part of the robot, which comprises chassis, wheel, and placement. We also need a device in a robot which can convert electrical energy to mechanical energy; they are called actuators. The most popular Actuator is DC Motor.
- Power Supply: Battery DC power supply is generally used in robots.
- Sensors: A robot generally consists of various sensors. These sensors help robots to take input and perform an action accordingly.
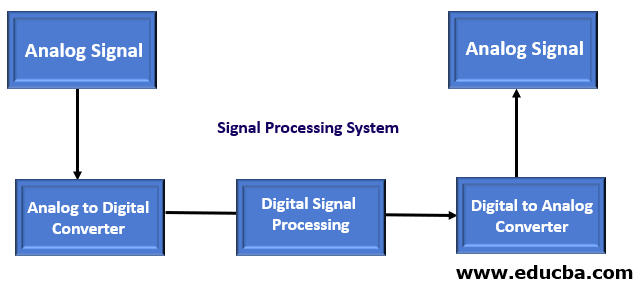
- Signal Processing: The signal processing system consists of various components.
They are as follows:
- Control System: Robotics control systems may have a lot of varieties.
Here is a brief look into the classification of robots based on the control systems:
History of Robotics
The history of robots takes us back to 3000 BC where the Egyptian water clock used human figurines to ring /strike the hourly bells. Then we trace back to 400 BC, where Archytas of Tarentum made a wooden pigeon that can fly using steam. The modern robotics era started briefly in the year 1950 where a person named George C. Devol, an inventor from Kentucky, invented a device called ‘Unimate’. It was a reprogrammable manipulator. However, it was a hard sell back then.
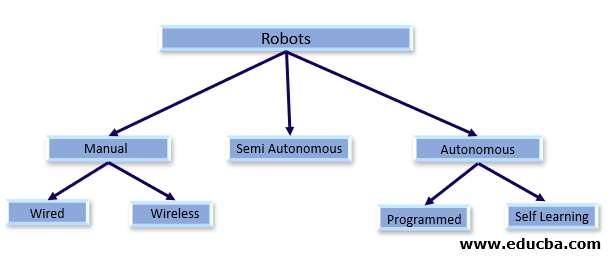
Classification of Robots
There are generally two different standards for these. One is known as JIRA (Japanese Industrial Robot Association), and another one is RIA (Robotic Industries Association America). We will see the JIRA standard here as it covers all the parameters of RIA already.
The classifications are as follows:
- Class 1: Manual Handling Device: This kind of robot gets operated by an operator though this kind of robot has some degree of freedom.
- Class 2: Fixed Sequence Robot: This type of robot can perform a fixed sequence of tasks in a cycle. However, the sequence is fixed and is not programmable.
- Class 3: Variable Sequence Robot: This type of robot was almost the same as fixed sequence robots except for that these robots are reprogrammable.
- Class 4: Playback Robot: This type of robot can playback a sequence automatically in a loop.
- Class 5: Numerical Control Robot: This kind of robot also works through a sequence of instructions. However, the instruction set is numerical.
- Class 6: Intelligent Robot: Robots that can sense the environment around using the sensors and take a necessary set of actions automatically are generally categorized as Intelligent robots.
Best Humanoid Robots
As we have said, earlier humanoid robots are kind of robots that look more or less like humans.
Let us look into some of the best humanoid robots ever made:
1. ASIMO
ASIMO stands for Advanced Step in Innovative Mobility. It was created by Honda in the year 2000. ASIMO is capable of walking, dancing, kicking the ball, etc. It can also detect objects around it using the dual camera on its head. This robot can detect voice commands and recognize gestures like a handshake. ASIMO is capable of automatic navigation using sensors. It also has laser sensors to detect the ground clearance in front of it.
2. NAO
NAO is created by Softbank Robotics in the year 2007. It is a humanoid robot that can walk, dance, and recognize human gestures. It has two eye cameras using which it can detect ground clearance and human gestures. It can reply to human greetings and customize the actions accordingly. Here are some specs of the latest Version of NAO for spec lovers:
| Height | 5.5 Kg |
| CPU | Intel Atom Quadcore |
| RAM | 4 GB |
| Compatible OS | C++, Java, Python, etc. |
| Simulation Environments | Webots |
3. ATLAS
ATLAS is developed by Boston Dynamics. This is a humanoid robot that is able to perform spectacular postures. The general purpose of building this robot was to be part of search and rescue operations along with other defense duties. This was released in the year 2013. This robot has been tested to break doors and rescue victims and drive vehicles at the crash sites etc.
4. ROMEO
Another creation of Softbank Robotics and was created in the year 2009. The purpose of the creation of this robot is basically for helping elderly and disabled persons. It is sometimes considered as the next step to the NAO robot by the same organization.
5. Ocean One
This is another humanoid robot that is made to explore the sea. This robot can go underwater and explore the deep sea. It can be controlled by a human pilot remotely, and it gives haptic feedback when it encounters an object undersea. This robot was developed by the joint venture between King Abdullah University of Science and Technology (KAUST) and Stanford robotic experts.
Best Non-Humanoid Robots
Let us look into some of the non-humanoid robots which are legendary in their own way:
1. SPOT
SPOT was previously known as SPOT MINI. It is a non-humanoid robot that is able to walk, run, climb stairs and pick up objects. This is created by Boston Dynamics in the year 2016. This robot went on sale for the first time in late 2019. Here are some specs:
| Height | 84 cm |
| Weight | 25 Kg |
| Speed | 3.6mph |
| Sensors | Camera, IMU and pressure sensors in the leg along with Positional sensor. |
2. da Vinci
It is a non-humanoid robot designed by Intuitive Surgical to perform surgical procedures like cardiac valve repair and other general surgery procedures. This robot can be controlled by doctors using the cameras in place. This was approved by FDA in the year 2000.
3. SOFI
SOFI is a robot fish developed by robotic experts at MIT. This robot can swim deep water and can gather valuable information using sensors onboard. This robot was made using the techniques used by tuna and jellyfish. The goal here is to make sure that this does not get attacked by other fish or sharks underwater, and so far, it looks promising.
Robonauts
Before we finish, let us look into another interesting segment of robotics, and they are robot astronauts, in short, Robonaut. They are developed for helping astronauts in space.
Let us see what these Robonaut do in brief:
- These robots easily roam around the surface and collect samples.
- It helps astronauts in taking various measurements.
- They can easily visit places unsafe for humans.
- They can fix instruments in space.
- Some robots have a small in-built lab to analyze samples
- These Robonaut can take pictures autonomously and also can be controlled remotely.
Here are a few greatest robonauts:
- RASSOR: RASSOR stands for Regolith Advanced Surface Systems Operations Robot. It is a lunar robot that can autonomously collect soil samples and analyze them. It can work 16 hours a day using its battery. RASSOR 2 is also under design and may be revealed soon.
- DEXTRE: This robot is called Special Purpose Dexterous Manipulator (SPDM). This robot has 2 arms and is a part of the International Space station. It works inside the Mobile Servicing System and was launched in the year 2008.
- Curiosity Rover: This is a very famous robot built by NASA to explore Mars. It was launched on November 26, 2011, and landed on Mars on August 6, 2012. It went to Mars in a two-year mission; however that tenure got extended recently. The goal of this robot is to explore the Organic Carbon compounds on Mars and analyze other geological, geochemical properties of mars. It has a lab inbuilt where it can analyze samples and send the result back to NASA.
Conclusion – What is Robotics?
We can conclude by saying that we are in the era of the machine where the machine is becoming more intelligent every day. Maybe that day is not so far when like Hollywood sci-fi movies, machines will be smart enough so that no programming will be required for them, and they will be able to do human tasks far better than we have ever imagined.
Recommended Articles
This is a guide to What is Robotics? Here we discuss the introduction, building blocks, history, classification, and best humanoid robots. You may also have a look at the following articles to learn more –