Introduction to Real-Time OS
A Real-Time Operating System (RTOS) is specifically designed for real-time systems and manages real-time applications. Unlike time-sharing systems like Unix, RTOS prioritizes event-driven and preemptive tasks so that the system can switch among tasks based on dynamically changed priorities. Processing time in an RTOS is crucial and must be constrained. It suits scenarios requiring timely responses to events, distinguishing itself from traditional time-sharing operating systems.

Key Takeaways
- A real-time operating system (RTOS) is designed for time-sensitive applications.
- It’s small and needs fewer resources.
- There are three types: Hard RTOS, Soft RTOS, and Firm RTOS.
- They are used in airline reservation systems, telecommunication, air traffic control, etc.
Table of Contents
- Introduction to Real-Time Operating System
- Importance of RTOS
- Characteristics of RTOS
- Application of RTOS
- Types of RTOS
- Advantages and disadvantages
- Components of RTOS
- How does an RTOS work?
- Task Scheduling in RTOS
- RTOS vs. GPOS
- Examples in RTOS
- Case Studies: Real-World Implementations
- Consideration of Factors While Looking for RTOS
- Future Trends in RTOS
Importance of RTOS
Various industries and applications employ Real-Time Operating Systems (RTOS) for their specialized capabilities.
Not all applications require multithreading or a Real-Time Operating System (RTOS). A “super loop” may suffice for simple applications without real-time constraints. However, as applications become more complex or have real-time requirements, relying solely on a super loop becomes impractical. A small change in the program can easily disrupt real-time constraints. An RTOS becomes essential as complexity increases, particularly for applications exceeding 32KB or involving network connectivity. Some designs use an RTOS for “future-proofing,” anticipating easier and safer updates and feature additions.
Here are key reasons to use RTOS.
- Concurrency– RTOS is beneficial when tasks need to appear concurrent, allowing multiple tasks to be in memory simultaneously. It efficiently switches between tasks based on events and priorities.
- Pre-emption– RTOS exhibits pre-emption, temporarily suspending tasks to execute higher-priority ones. It excels in scenarios where task prioritization and interruption are crucial for embedded software development.
- Available RAM- The amount of available RAM is crucial for RTOS suitability. Systems with less than 4KB of RAM may need help due to individual task control blocks and stacks. A minimum of 4KB, preferably 8KB, is recommended for an effective RTOS.
- Available Flash- Flash space considerations are vital when choosing an RTOS. While RTOS typically uses 8-10KB of Flash space, a microcontroller with only 16KB may limit application code space. Ideally, a microcontroller should have at least 32KB of Flash space for optimal RTOS usage-
- Synchronization Tools- RTOS provides synchronization tools like Mutexes for resource protection, Semaphores for task signaling and synchronization, and message queues for data transfer. Properly implementing these tools is essential for systems with multiple tasks and shared resources.
- Third-Party Software- RTOS facilitates the integration of third-party software stacks and tools, making them plug-and-play within the software. This accelerates software development and may indicate the suitability of using an RTOS.
- Ease of Use- RTOS is widely available for various microcontrollers and applications. It is user-friendly, allowing developers to create prototypes or robust systems quickly. However, proper analysis and thoughtful system design are essential to harness an RTOS’s power effectively.
Characteristics of Real-Time Operating Systems
Real-Time Operating Systems (RTOS) have specific characteristics distinguishing them from general-purpose operating systems. Here is a list of key characteristics.
- Deterministic and Predictable Behavior
RTOS ensures tasks are done within specific time limits, providing consistent results. It works well for applications with crucial timing, like controlling a robotic arm or processing real-time sensor data. RTOS uses algorithms to manage task times, ensuring predictability and reducing variations.
- Priority-based scheduling
RTOS prioritizes important tasks over less critical ones, ensuring it completes crucial tasks first. In RTOS, developers assign a priority level to each task, and the scheduler chooses and executes high-priority tasks. Priorities keep on being adjusted dynamically based on real-time task needs.
- Efficiently Managing Resources
RTOS handles system resources efficiently, from memory and input/output operations to processing power. Algorithms manage how these resources are assigned and scheduled to meet real-time task requirements, optimizing overall system performance.
- Making Systems Easy to Update
RTOS supports a modular design. It helps create independent and reusable task modules. It improves testing and maintenance and makes it easy to add new features without impacting the entire system. Tasks are designed as independent modules with clear interfaces, enhancing flexibility and maintainability.
- Ensuring Safety and Security
RTOS reliably executes critical tasks essential in applications like medical devices and automotive systems. Security features protect against unauthorized access. Safety-critical tasks receive special attention, and features like memory protection and redundancy enhance overall system safety.
- Small footprint
RTOS has a small and efficient footprint, saving memory and processing power. This is useful in environments with limited resources, such as embedded systems and IoT devices. Achieving a small footprint involves minimizing code size and memory requirements.
- Maximizing Performance
RTOS makes the most of system resources for efficient performance in real-time applications. It minimizes delays and provides quick response times. Efficient scheduling algorithms, task prioritization, and streamlined resource management contribute to top-notch performance in time-sensitive tasks.
Application of Real-Time Operating Systems
Real-Time Operating Systems (RTOS) are involved in various industries due to their accurate timing, reliability, and deterministic behavior. Here are some detailed examples of RTOS applications
1. Aerospace Industry
- Application: Flight Control Systems
○ RTOS ensures precise control of aircraft systems, managing tasks such as navigation, autopilot, and communication in real-time.
- For example, VxWorks is used in the Boeing 787 Dreamliner.
2. Medical Devices
- Application: Pacemakers
○ RTOS regulates the delivery of electrical pulses to the heart in time for proper heart function.
- Examples include the use of RTOS in Medtronic’s pacemaker systems.
3. Automotive Systems
- Application: Engine Control Units (ECUs)
○ RTOS controls critical functions like fuel injection and ignition timing in vehicles.
- For example, AUTOSAR (a standard for automotive software) often utilizes RTOS for safety-critical applications.
4. Industrial Automation
- Application: Programmable Logic Controllers (PLCs)
○ RTOS controls and monitors manufacturing processes, ensuring precise timing in tasks like robotic assembly lines.
- An example includes the use of Nucleus RTOS in Siemens SIMATIC controllers.
5. Telecommunications
- Application: Network Switches
○ RTOS ensures low-latency and high-throughput data transfer in network switches for optimized communication network performance.
- Examples include Cisco IOS th, a proprietary operating system that Cisco routers and switches use.
6. Consumer Electronics
- Application: Smart TVs
○ RTOS manages tasks like video decoding, user interface responsiveness, and connectivity in smart TVs.
- Examples include using TizenRT, a lightweight RTOS-based platform in Samsung Smart TVs.
7. IoT Devices
- Application: Smart Thermostats
○ RTOS handles real-time requirements in IoT devices for timely responses to environmental changes.
- Examples include FreeRTOS, which is used in Nest thermostats.
8. Avionics Systems
- Application: Avionic Displays
○ RTOS displays real-time critical information on cockpit screens, contributing to the safe operation of aircraft.
- For example, the INTEGRITY-178B real-time operating system (RTOS) in Rockwell’s new Avionics Management and Display System (AMDS) for the Sikorsky S-92 helicopter.
Types of Real-Time Operating Systems
Real-time operating Systems (RTOS) come in various types, each catering to specific timing and reliability requirements. Here are the three main types.
- Hard Real-Time Operating System
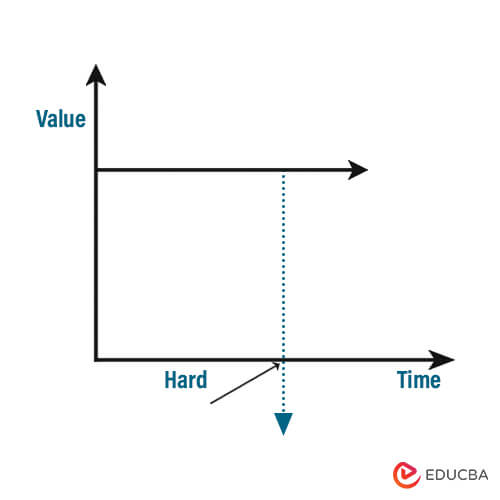
This operating system type finds use in applications where tasks must meet strict and deterministic deadlines.Failure to meet a deadline is considered a system failure. Examples include pacemakers, avionics systems, and automotive control units.
Consider the case of a pacemaker. It incorporates flexible, insulated wires (leads) in one or more heart chambers. These wires administer precise electrical pulses to regulate the heart rate, necessitating the implementation of a hard real-time operating system.
- Soft Real-Time Operating System
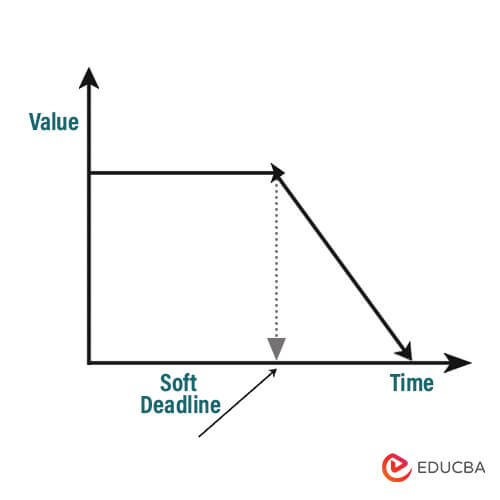
This type of operating system is suitable for applications where occasional delays are acceptable. If a task takes a bit longer than expected, it doesn’t result in critical system failure. These find applications in control systems, multimedia applications, and telephone switches. QNX, a soft RTOS, is often utilized in various systems.
In the case of telephone switches, sending or receiving calls takes time and cannot be considered a failure.
- Firm Real-Time Operating System
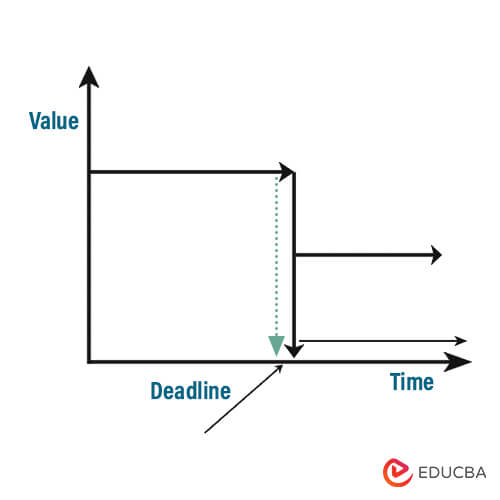
This type of operating system falls between hard and soft real-time systems. While a few missed deadlines won’t cause total failure, excessive delays may lead to catastrophic failure. It includes video conferencing systems, where late frames may be discarded, but the system continues to operate. Windows CE is a firm RTOS.
In video conferencing, if a specific frame is already being shown, and another frame that was supposed to come before it arrives late, the late-arriving frame is not valid anymore. In this case, the system discards the late frame because it’s no longer needed to maintain the flow of the video.
Advantages and disadvantages
Advantages
- Consistency– RTOS excels in maintaining consistency. It’s crafted to handle tasks with strict timing needs, ensuring users can trust that it will always complete tasks on time. This is crucial in areas like industrial automation or medical devices where timing is crucial.
- Dependability- RTOSs have a reputation for being reliable. They are less likely to crash or experience errors than other operating systems. This reliability results from their efficient and streamlined design, reducing the chances of bugs and mistakes.
- Effectiveness- RTOSs are designed to be highly effective, utilizing fewer resources than other operating systems. This is important for devices with limited processing power or battery life, as an RTOS helps extend the device’s lifespan.
- Real-time Information- An RTOS can provide real-time data, allowing users to receive the latest information about their systems or devices. This is vital in areas like air traffic control or financial trading, where timing is crucial.
- Adaptability- RTOSs are designed to be adaptable, fitting a wide range of applications and devices. This is especially useful for users who develop applications for various devices or systems.
Disadvantages
- Complexity- Real-time operating systems are more intricate than other types, demanding higher technical expertise. This can be a challenge for users unfamiliar with low-level programming.
- Cost- RTOSs may be pricier than other systems due to their specific design, requiring specialized hardware or software. This might not be ideal for users on tight budgets.
- Limited Resources- RTOSs, being highly efficient, may allocate limited resources. Users might need to prioritize tasks, creating challenges for running multiple applications simultaneously.
- Inflexibility– RTOSs, tailored for tasks with strict timing, lack flexibility compared to other systems. This may be a drawback for users needing quick application changes or frequent task-switching.
- Development Time- Building an RTOS application takes longer due to specialized knowledge and extensive testing for timely task completion.
Components of a Real-Time Operating System
Real-Time Operating Systems (RTOS) comprise essential components for precise and timely task execution. Key components include.
- Scheduler: Determines task execution order based on priorities, prioritizing urgent tasks.
- Task Management: Manages task creation, scheduling, and termination, serving as the fundamental unit of work.
- Interrupt Service Routines (ISRs): Handles external interrupts swiftly, minimizing response time.
- Clock and Timer Services: Provides accurate timekeeping for time-sensitive tasks and events.
- Memory Management: Allocates and deallocates memory efficiently, optimizing system performance.
- Inter-Process Communication (IPC): Facilitates seamless communication between tasks for effective collaboration.
- Device Drivers: Interfaces with hardware devices to manage input/output operations.
- Optional Components:
- File Systems: Manages data storage (optional).
- Communication Stacks: Handles networking protocols (optional).
- Error Handling and Fault Tolerance: Detects and manages errors, ensuring system robustness.
Collectively, these components ensure the efficiency and reliability of Real-Time Operating Systems in meeting stringent timing requirements across diverse applications. Specific configurations may vary based on system requirements.
How does an RTOS work?
A Real-Time Operating System (RTOS) operates by efficiently managing tasks with strict timing requirements, utilizing a scheduler to prioritize and schedule tasks based on urgency. Interrupt handling ensures a swift response to external events, while deterministic timing guarantees task execution within specified constraints. Task management, resource allocation, and memory optimization are carefully controlled, contributing to overall system efficiency. Clock and timer services maintain accurate timekeeping crucial for time-sensitive tasks. Inter-Process Communication (IPC) facilitates task collaboration, and specialized device drivers handle input/output operations. Fault tolerance mechanisms enhance system reliability, and scalability allows adaptation to diverse hardware platforms. An RTOS orchestrates these components to meet the stringent timing demands of real-time applications in various industries.
Task Scheduling in RTOS
In a real-time operating system (RTOS), task scheduling is about deciding which task to do next, considering the system’s resources and the priorities and deadlines of tasks. This is crucial to ensure that tasks with specific timing requirements in real-time scenarios meet their deadlines.
RTOS uses two main approaches for task scheduling: preemptive, which allows interrupting a running task for a higher-priority one, and non-preemptive, which doesn’t interrupt tasks once they start.
- In an RTOS, preemptive scheduling lets the system interrupt a task to prioritize a more important one, ensuring critical tasks meet deadlines.
- Non-preemptive scheduling doesn’t allow interruptions, which is suitable for tasks that need continuous focus but may cause delays for higher-priority tasks if a lower-priority task takes a long time.
In RTOS task scheduling, aside from preemption, algorithms also account for task priority, where higher-priority tasks are prioritized over lower-priority ones. Additionally, some algorithms consider task deadlines, prioritizing tasks closer to their deadlines. Task execution time is another factor, ensuring tasks are scheduled to finish within specified deadlines. Lastly, resource availability, including memory or peripherals, influences scheduling decisions, with tasks scheduled only if the necessary resources are accessible.
RTOS task scheduling is a vital aspect of real-time systems, involving complex algorithms carefully designed to meet specific needs. Standard scheduling methods include priority-based, where tasks with the highest priority run first; round-robin, giving each task equal time; and deadline-based, prioritizing tasks with earlier deadlines.
The choice depends on the system’s requirements; for instance, priority-based for mixed-criticality, round-robin for periodic tasks, or deadline-based for tasks with strict deadlines. Developing a well-designed task scheduler ensures the system meets performance and reliability standards in real-time applications.
Comparison Between RTOS vs. GPOS
| Feature | Real-Time Operating System (RTOS) | General-Purpose Operating System (GPOS) |
| Primary Focus | Precise and deterministic task execution timing. | General-purpose computing with flexibility in tasks. |
| Task Scheduling | Prioritizes tasks based on urgency and deadlines. | Schedules tasks for optimal resource utilization. |
| Preemption | Often preemptive, allowing interruption of tasks. | It may be preemptive or non-preemptive based on design. |
| Timing Requirements | Strict adherence to real-time constraints. | Tolerant of occasional delays, not strictly real-time. |
| Complexity | More streamlined and tailored for specific tasks. | It is more complex, accommodating a wide range of functions. |
| Predictability | High predictability in task execution times. | Predictability may vary due to system multitasking. |
| Use Cases | Critical applications like aerospace or healthcare. | General-purpose computing like desktops or servers. |
| Resource Allocation | Optimizes resource allocation for real-time tasks. | Resource allocation may vary based on system demands. |
| Size and Footprint | Typically, a smaller footprint is needed for resource efficiency. | Larger footprint to support diverse applications. |
| Determinism | Emphasizes deterministic behavior for tasks. | Determinism may be compromised for flexibility. |
| Error Handling and Fault Tolerance | Emphasizes fault tolerance for critical applications. | It tends to focus less on fault tolerance in all scenarios. |
| Examples | VxWorks, FreeRTOS, QNX, μC/OS-III. | Windows, Linux, macOS. |
Examples
Designed for applications with strict timing requirements, Real-Time Operating Systems (RTOS) provide precise control over task execution and response times.
FreeRTOS
FreeRTOS is an open-source Real-Time Operating System (RTOS) kernel for embedded systems. It provides a small footprint, making it suitable for resource-constrained devices. FreeRTOS follows a modular design and offers preemptive multitasking and real-time scheduling features. Widely used in various industries, including automotive, medical devices, consumer electronics, and industrial automation, they find applications in embedded systems, IoT devices, and applications where a compact and efficient RTOS is required.
VxWorks
Wind River Systems developed VxWorks, a proprietary real-time operating system primarily used for embedded systems to achieve real-time and deterministic performance. VxWorks employs a microkernel architecture for stability and security when used in critical applications such as aerospace, automotive, and industrial control systems.
It supports multiple architectures- AMD/Intel, ARM, POWER, and RISC-V. This versatile operating system runs on both 32 and 64-bit processors. It is adaptable for various configurations, such as multicore mixed modes, symmetric/asymmetric multiprocessing, and multi-OS architectures.
QNX
Commonly known for its reliability and real-time responsiveness, it comes with a microkernel architecture, providing stability and security. Mainly used in automotive systems, medical devices, and industrial automation, where safety and real-time performance are crucial. It has a microkernel architecture, POSIX compatibility, and high-level real-time responsiveness.
Primarily used in automotive infotainment systems, medical devices, industrial automation, and safety-critical applications.
μC/OS-III
This real-time kernel is designed for embedded systems, offering preemptive multitasking and real-time response. Developed by Micrium, it provides a small footprint and is suitable for applications with strict real-time requirements. Commonly used in embedded systems, IoT devices, and applications requiring deterministic behavior, she is popularly known for preemptive multitasking, small memory footprint, and real-time responsiveness.
RTOS-32
This RTOS is specifically designed for Windows systems, offering real-time capabilities for applications running on Windows platforms. RTOS-32 allows real-time tasks to coexist with standard Windows applications. It is commonly known for its real-time performance on Windows, multi-core support, and integration with Windows development tools. It’s real-time applications on Windows platforms and embedded systems with Windows-based interfaces.
ChibiOS/RT
Designed for deeply embedded systems, this RTOS has a low footprint and supports various microcontrollers. ChibiOS/RT provides preemptive multitasking and is suitable for resource-constrained devices. It offers a Low footprint, preemptive multitasking, and support for multiple microcontrollers. Primarily utilized in applications with stringent resource constraints, embedded systems, and Internet of Things devices.
ThreadX
A widely used commercial RTOS with a small footprint, suitable for applications with stringent timing requirements, providing fast context switching and real-time determinism. It has a Small footprint, fast context switching, and real-time determinism. Generally used in consumer electronics, networking equipment, automotive control systems, and other applications with real-time constraints.
NuttX
This RTOS is implemented and designed for various microcontrollers. It features a POSIX-like API, making it compatible with multiple software applications. NuttX is known for its scalability and support for different architectures. It offers features like- POSIX compatibility, scalability, and support for various microcontroller architectures. Commonly used in embedded systems, IoT devices, and applications requiring POSIX compatibility.
INTEGRITY
It is a secure and reliable RTOS in avionics, automotive, and medical device applications. It strongly emphasizes safety and security, making it suitable for safety-critical systems. It is commonly known for its high reliability, security features, and support for safety-critical applications. Primarily used in avionics, automotive control systems, medical devices, and other safety-critical applications where reliability and security are paramount.
Case Studies: Real-World Implementations
Below are the real-world implementations of RTOS.
- Aerospace and Defense
Unique computer systems use Real-Time Operating Systems in airplanes and military systems to ensure everything runs smoothly. It includes controlling the plane, navigation, and communication systems.
- Medical Devices
Devices like infusion pumps and medical monitors use Real-Time Operating Systems to ensure they work precisely and quickly. It’s essential for precise readings and on-time medication delivery.
- Automotive Systems
Your car’s computer system uses Real-Time Operating Systems to control important things like the engine, brakes, and safety features. It helps your vehicle respond quickly to changes on the road.
- Industrial Automation
Factories and machines in industries use Real-Time Operating Systems to manage tasks like controlling robots, overseeing the production process, and making sure everything works smoothly and on time.
- Telecommunications
Real-Time Operating Systems are used in equipment like routers and switches in phones and the internet. They help manage data quickly and efficiently to ensure your calls and internet connections work well.
Consideration of Factors While Looking for RTOS
When choosing an RTOS, consider these essential factors.
- Performance- How well the RTOS performs is crucial. It needs to handle tasks efficiently and quickly.
- Middleware Support- Ensure the RTOS supports middleware. With it, integrating processes may take less time.
- RTOS systems ensure error-free operation, completing tasks without mistakes.
- Embedded Systems- RTOS programs are small, making them ideal for embedded systems.
- Maximum Consumption- RTOS helps achieve maximum consumption, maximizing system resources.
- Task Shifting- Tasks shift quickly with RTOS, minimizing delays.
- Unique Features- A good RTOS should have distinctive features like efficient memory protection and effective command execution.
- 24/7 Performance- RTOS is perfect for applications that must run continuously, 24/7.
Future Trends
- RTOS and Big Data
Real-Time Operating Systems (RTOS) are pivotal in the ever-expanding realm of big data, notably in the context of the Internet of Things (IoT) and embedded devices. These devices in diverse environments like industrial facilities and homes generate extensive data, contributing significantly to significant data sources. RTOS, powering approximately 70 percent of embedded systems, stands out as the preferred operating system for these data-intensive operations. The RTOS market is poised for substantial growth, with an anticipated 23 percent Compound Annual Growth Rate (CAGR) from 2023 to 2030, exceeding a market value of $2.5 billion. As edge computing and generative artificial intelligence become integral to modern digital life, RTOS’s role in ensuring reliable data processing gains even more prominence in the future of extensive data collection and processing.
- RTOS and AI
The global real-time operating systems (RTOS) market, valued at $1345.86 million in 2022, is expected to expand, reaching $2235.52 million by 2028. The integration of Machine Learning contributes to this market growth by elevating RTOS capabilities through intelligent decision-making and adaptive learning. Consequently, the global RTOS market is poised for sustained development, presenting opportunities for companies and developers to innovate and create advanced, responsive, and intelligent embedded systems that redefine industries and enhance user experiences.
Conclusion
A Real-Time Operating System (RTOS) is tailored for time-sensitive applications, prioritizing event-driven and preemptive tasks. It ensures deterministic and predictable behavior, making it crucial for aerospace, medical devices, and telecommunications industries. RTOS offers advantages such as consistency, dependability, and efficiency but may pose challenges in complexity and cost. Key components include a scheduler, task management, interrupt service routines and memory management. Examples include FreeRTOS, VxWorks, and QNX. The market for RTOS is expanding with trends in big data and artificial intelligence, indicating its vital role in shaping the future of embedded systems and intelligent decision-making.
Frequently Asked Questions (FAQs)
Q1. Are there open-source Real-Time Operating Systems available?
Answer: Yes, several open-source RTOS options exist, such as FreeRTOS and RTEMS. These platforms provide developers with flexibility and cost-effectiveness for various real-time applications.
Q2. Does RTOS support multicore processors?
Answer: We design many RTOS implementations to support multicore processors, enabling parallel processing and improving system performance in applications with high computational demands.
Q3. Can RTOS be used in systems with varying workload demands?
Answer: Yes, RTOS is adaptable to systems with varying workload demands. Its modular task-based development and dynamic scheduling capabilities allow it to efficiently handle changing workloads without compromising real-time responsiveness.
Recommended Articles
We hope that this EDUCBA information on “Real-Time Operating System (RTOS )” was beneficial to you. You can view EDUCBA’s recommended articles for more information,
