Updated February 27, 2023
Introduction to Line Follower Robot
The line follower robot is a simple robot that is based on automation that follows a specific direction based on a particular line, usually a dark line on a light surface. The robot consists of two sensors that are installed at the front end of the robot body and two wheels that are driven by DC motors. The circuit board present in the robot controls the wheel speed based on the input signal from the sensors. The controlling of the robot is done like that when the robot sees a black line it stops.
What is Line Follower Robot?
Before talking about the line follower robot, let us understand what a robot is. A robot is basically an automated machine that works on itself without the presence or requirement of human beings and is implemented in such a way that it can do almost the same work, take the same burden of human being, bringing convenience and time saving for humans.
There are various ways to control a robot and George Devol introduced the first robot that was launched in the market in the early 1960s. There are some laws made for robots when it was launched.
- The first is that the robots should not do any harm to the public in any condition.
- The second is that robots should acknowledge human decisions, guidance, and advice.
- The third law is that if the first two laws do not violate the robot should protect itself from any cause.
In the recent trend of technology improvements, the robots are designed in such a way that it can move freely anywhere they want and among the freely moving robots, one of the most powerful and advanced robots that came into the picture is Line follower Robot.
- A line follower robot is a type of robot that follows a particular direction or path and maintains its own working nature based on the situation it faces.
- Line follower robot actually follows a feedback mechanism where the path is basically a black line or a dark line on the white or light surface.
- Line follower robot has lots of usage in present-day applications including carrying small babies to shopping malls, home, entertainment areas, and many more.
- In industrial areas, line follower robot plays a major role as it is mainly used for carrying various industrial goods and transporting the same from one location to another.
- The line follower robot follows the same path that has been set for use to go. It follows the same track, never got deviated and for making products in the industries, the robot plays the role.
- There are two types of line follower robots in the market. The first is the mobile-based line following robot and the next one is RF based line following robot.
How to Make Line Follower Robot?
How to Make Line Follower Robot are Explain below:
The basic design consists of the below few steps:
- First to design the entire outer structure body of the robot.
- The second is to define what the kinematics of the robot is.
- The third is to design the control system of the robot.
1. Designing the Outer Structure of the Robot
The body of the robot is mainly designed using AutoCAD technology. The basic line follower robot consists of a base that the robot will form, on both ends where wheels are present. Basically, hard plastic is mainly used for the creation of its base. A cylindrical body is attached with it along with other forms of material bodies, connecting each other by joints and defining its motion for a particular path. Therefore, the robot has a fixed wheelbase and bodies interconnected by joints.
2. Defining the Kinematics
This part is crucial as the total movement of the robot depends on this, the projectile part, and the motion. The overall dynamic movement of the robot entirely depends on the structure and combination of coordinate systems. The Workspace software takes care of the kinematics part.
3. Designing the Control System
The control system of the robot also plays a major role as it is entirely dependent on the motion of control. The movement of wheels is also controlled using the phenomena. The line follower robot follows a basic trajectory on which it is made and the movement and control of the robot are dependent on the wheel rotation, controlled by motors and sensors.
There are two ways of controlling, one is using a microcontroller and the other one is without a microcontroller.
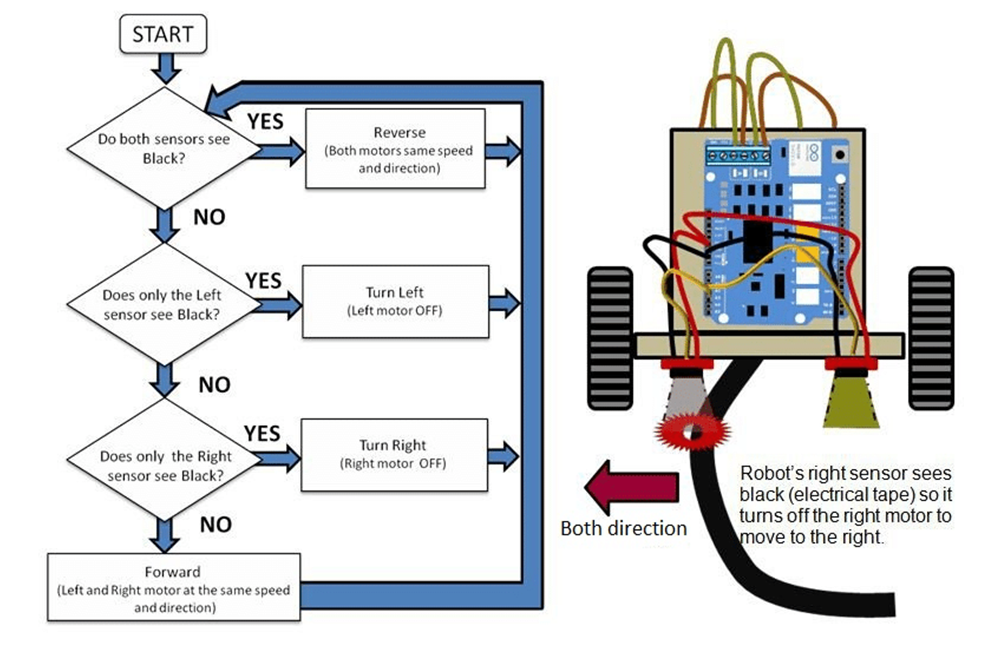
Without Microcontroller:

It consists of an IR sensor, Photo-Diode, and a transistor. The mechanism is controlled by operating mainly on the transistors.
The IR light sensor gets reflected when there is a light surface, there is a change in the current passing through the photodiode and the voltage significantly reduces. The transistor starts conducting after the voltage level increases and the motor connected with the transistor starts rotating due to motion. After the robot faces a black or dark line, IR light does not get reflected and the motor stops rotating.
Using Microcontroller:
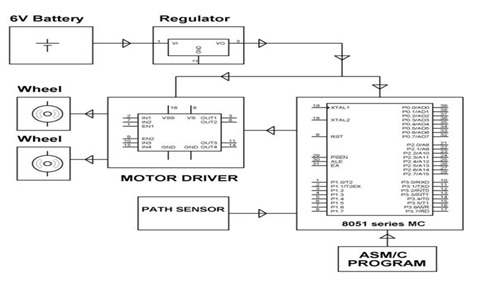
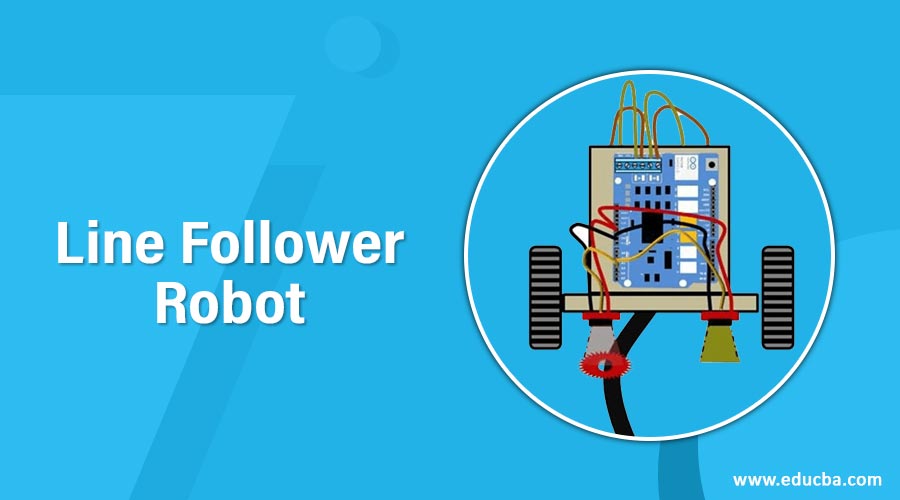
It can immediately detect a path and follows it according to it. The system is designed in such a way that it can sense the line from a long distance using the sensors. In this arrangement, there are two types of sensors involved, one is IR and proximity sensors. The microcontroller controls the system where IR detects any objects present and the proximity detects the path to follow.
Examples of Line Follower Robot
- It is used in industrial areas for moving obstacles and goods.
- It is used in automobile applications such as automatic cars seen on roads.
- It is used for home purposes like cleaning floors.
- It is also used in public places like malls and entertainment areas for showing and guiding paths to travelers.
Recommended Articles
This is a guide to Line Follower Robot. Here we also discuss what is line follower robot is along with how to make line follower robot. You may also have a look at the following articles to learn more –